O robô Mini Trinca participa da categoria mini-sumô e nasceu em 2018, a partir de um projeto derivado da intenção de resolver os erros que o robô Dino, da mesma categoria, ainda apresentava. Ao longo da construção do projeto, foi buscado atender ao ideal de ter um centro de massa muito baixo, a maior pressão possível na rampa, um controle muito bom e a maior força de impacto possível.
O projeto apresentou diversos desafios durante sua elaboração, que envolveram principalmente a complexidade adicional da implementação da comunicação I2C (utilizada na programação devido à utilização de sensores que se comunicam utilizando esse tipo de barramento). A primeira competição do projeto foi o Winter Challenge 2018.
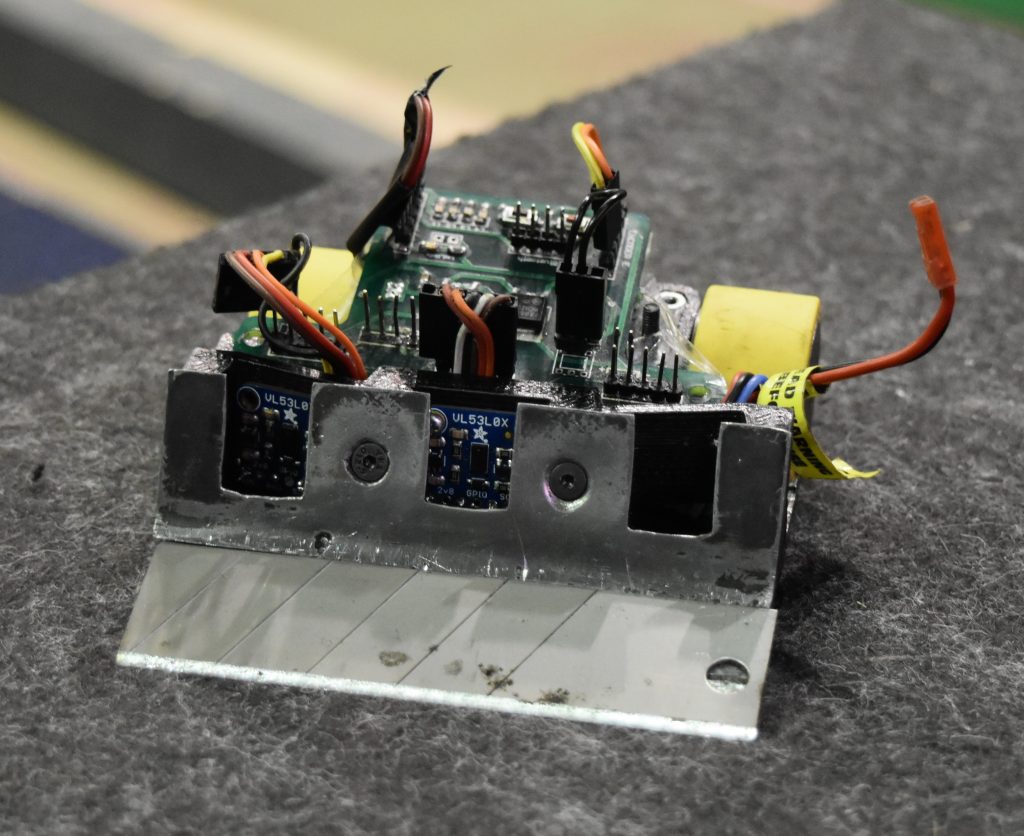
O Mini Trinca utiliza uma placa Athena própria (modificada à partir da placa Athena original para se encaixar melhor no robô, e sendo compatível com futuros upgrades, como a implementação de um módulo bluetooth, por exemplo). Seus motores são do modelo Pololu 30:1 de 12V. O sensoriamento é feito através de 3 sensores de módulo de alcance à laser do modelo VL53L0X, que utilizam a comunicação I2C. O robô ainda conta com uma bateria Turnigy 2S e uma estrutura com base e laterais feitas de alumínio e rampa de aço.